The Vulkan Graphics API, what it means for Linux – David Airlie
- What is Vulkan
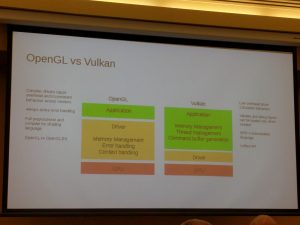
- Not OpenGL++
- From Scratch, Low Level, Open Graphics API
- Stack
- Loader (Mostly just picks the driver)
- Layers (sometimes optional) – Seperate from the drivers.
- Validation
- Application Bug fixing
- Tracing
- Default GPU selection
- Drivers (ICDs)
- Open Source test Suite. ( “throw it over the wall Open Source”)
- Why a new 3D API
- OpenGL is old, from 1992
- OpenGL Design based on 1992 hardware model
- State machine has grown a lot as hardware has changed
- Lots of stuff in it that nobody uses anymore
- Some ideas were not so good in retrospec
- Single context makes multi-threading hard
- Sharing context is not reliable
- Orientated around windows, off-screen rendering is a bolt-on
- GPU hardware has converged to just 3-5 vendors with similar hardware. Not as much need to hid things
- Vulkan moves a lot of stuff up to the application (or more likely the OS graphics layer like Unity)
- Vulkan gives applications access to the queues if they want them.
- Shading Language – SPIR-V
- Binary formatted, seperate from Vulkan, also used by OpenGL
- Write Shaders HSL or GLSL and they get converted to SPIR-V
- Driver Development
- Almost all Error checking needed since done on the validation layer
- Simpler to explicitly build command stream and then submit
- Linux Support
- Closed source Drivers
- Nvidia
- AMD (amdgpu-pro) – promised open source “real soon now … a year ago”
- Open Source
- Intel Linux (anv) –
- on release day. 3.5 people over 8 months
- SPIR -> NIR
- Vulkan X11/Wayland WSI
- anv Vulkan <– Core driver, not sharable
- NIR -> i965 gen
- ISL Library (image layout/tiling)
- radv (for AMD GPUs)
- Dave has been working on it since early July 2016 with one other guy
- End of September Doom worked.
- One Benchmark faster than AMD Driver
- Valve hired someone to work on the driver.
- Similar model to Intel anv driver.
- Works on the few Vulkan games, working on SteamVR
- Intel Linux (anv) –
- Closed source Drivers
Building reliable Ceph clusters – Lars Marowsky-Brée
- Ceph
- Storage Project
- Multiple front ends (S3, Swift, Block IO, iSCSI, CephFS)
- Built on RADOS data store
- Software Defined Storage
- Commodity servers + ceph + OS + Mngt (eg Open Attic)
- Makes sense at 4+ servers with 10 drives each
- metadata servce
- CRUSH algorithm to speread out the data, no centralised table (client goes directly to data)
- Access Methods
- Use only what you need
- RADOS Block devices <– most stable
- S3 (or Swift) via RadosGW <– Mature
- CephFS <— New and pretty stable , avoid stuff non meta-data intensive
- Introducing Dependability
- Availability
- Reliability
- Duribility
- Safety
- Maintainability
- Most outages are caused by Humans
- At Scale everything fails
- The Distributed systems are still vulnerable to correlated failures (eg same batch of hard drives)
- Advantages of Heterogeneity – Everything is broken different
- Homogeneity is non-sustainable
- Failure is inevitable; suffering is optional
- Prepare for downtime
- Test if system meets your SLA when under load and when degraded and during recovery
- How much available do you need?
- An extra nine will double your price
- A Bag full of suggestions
- Embrace diversity
- Auto recovery requires a >50% majority
- 3 suppliers?
- Mix arch and stuff between racks/pods and geography
- Maybe you just go with manually added recovery
- Hardware Choices
- Vendors have reference archetectures
- Hard to get vendors to mix, they don’t like that and fewer docs.
- Hardware certification reduces the risk
- Small variations can have huge impact
- Customer bought network card and switch one up from the ref architecture. 6 months of problems till firmware bug fixed.
- How many monitors do I need?
- Not performance critcal
- 3 is usually enough as long as well distributed
- Big envs maybe 5 or 7
- Don’t coverge (VMs) these with other types of nodes
- Storage
- Avoid Desktop Disks and SSDs
- Storage Node sizing
- A single node should not be more than 10% of your capacity
- You need space capacity at least as big as a single node (to recover after fail)
- Durability
- Erasure Encode more durabily and high percentage of disk used
- But recovery a lot slower, high overhead, etc
- Different strokes for different pools
- Network cards, different types, cross connect, use last years cards
- Gateways: tests okay under failure
- Config drift: Use config mngt (puppet etc)
- Monioring
- Perf as system ages
- SSD degradation
- Updates
- Latest software is always the best
- Usually good to update
- Can do rolling upgrades
- But still test a little on a staging server first
- Always test on your system
- Don’t trust metrics from vendors
- Test updates
- test your processes
- Use OS to avoid vendor lock in
- Disaster will strike
- Have backups and test them and recoveries
- Avoid Complexity
- Be aggressive in what you test
- Be commiserative in what you deploy only what you need
- Q: Minimum size?
- A: Not if you can fit on a single server
- Embrace diversity
